












Gareth Meirion-Griffith
NASA Jet Propulsion Laboratory
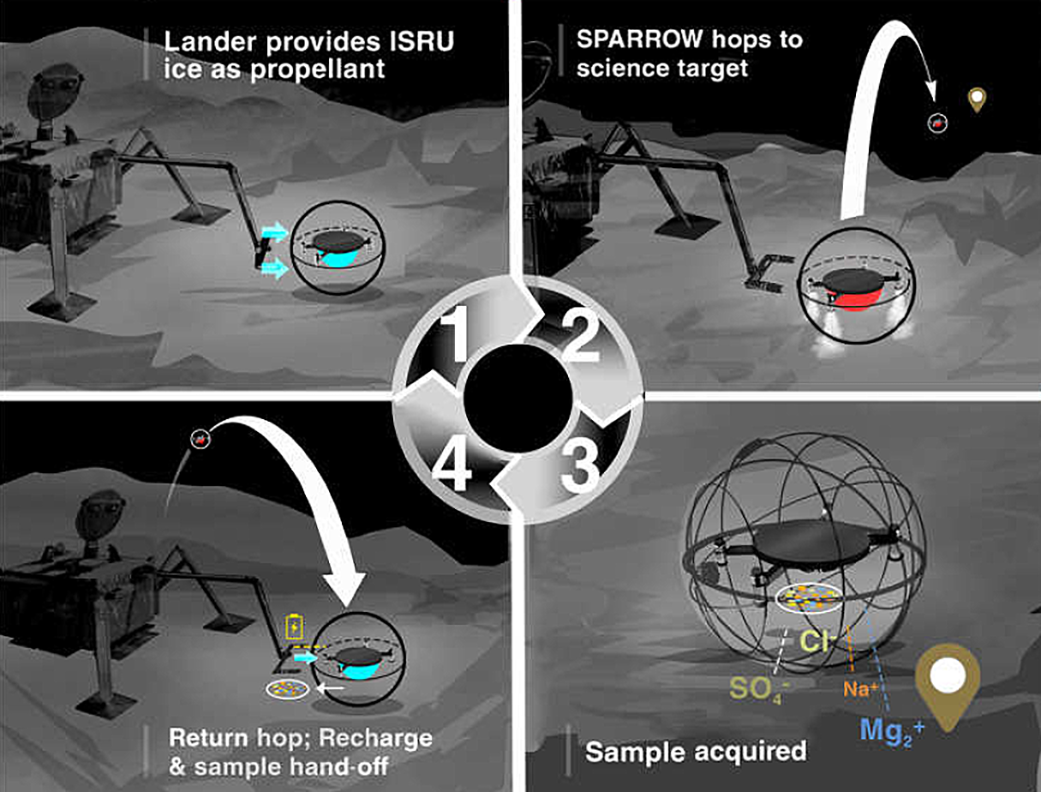
We propose to perform a novel investigation into the ability of a propulsively hopping robot to reach targets of high science value on the icy, rugged terrains of Ocean Worlds. The employment of a multi-hop architecture allows for the rapid traverse of great distances, enabling a single mission to reach multiple geologic units within a timespan conducive to system survival in a harsh radiation environment. We further propose that the use of a propulsive hopping technique obviates the need for terrain topographic and strength assumptions and allows for complete terrain agnosticism; a key strength of this concept. The objectives detailed in this proposal will be accomplished through the interdisciplinary collaboration of world leading robotics, propulsion, sample acquisition engineers, and planetary scientists from JPL, Purdue University, and Honeybee Robotics.



