
Have you ever wondered what it takes to build a rover like NASA’s Curiosity rover, part of the Mars Science Laboratory project? One would rightfully assume it takes expertise in mechanical engineering, software development, and electronics to even begin to construct such a complex robot. Now students, hobbyists, and enthusiasts can learn about these skills and get a taste of what it is like to construct such a rover using plans and instructions from JPL’s Open Source Rover Project.
After the successful landing of Curiosity on Mars, the Jet Propulsion Laboratory in Pasadena, California built a smaller educational model of the rover (called “ROV-E”) which was used as an education tool for high school and university students, as well as the general public. It was a rover that could be brought into classrooms, museums, and school events to demonstrate robotic principles first-hand. The response to this rover was very positive and often included the question “How can we build one of our own?”. With ROV-E being somewhat costly and complicated to build, JPL engineers went to work designing a model that could be assembled from commercial off-the-self (COTS) parts for as little as $2,500, so that people interested in building their own rover could do just that.
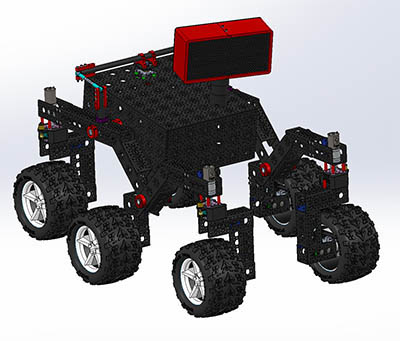
The JPL Open Source Rover (OSR) is a scaled down version of Curiosity, from its 6-wheel steering all the way to its Rocker-Bogie suspension. JPL published this design under an open source license on GitHub where anybody can download baseline instructions and test plans for building their own OSR. “We wanted to give back to the community and lower the barrier of entry by giving hands on experience to the next generation of scientists, engineers, and programmers,” states Tom Soderstrom, the project sponsor for the Open Source Rover. Mik Cox, the project manager adds, “I would love to have had the opportunity to build this rover in high school, and I hope that through this project we provide that opportunity to others.”
While the OSR instructions are quite detailed, they still allow the builder the option of making their own design choices. For example, builders can decide what controllers to use, weigh the trade-offs of adding USB cameras or solar panels, and even attach science payloads. The baseline design of OSR has plenty of headroom in the power system and computation that will allow users to choose how they want to customize and add to their rover, touching on multiple hardware and software principles along the way.
Releasing the rover design as open source also gives builders a community to interact with and share design ideas. Test builds of this rover have already been constructed inside classrooms, leading to lots of different designs, ideas, and solutions to common problems. “It was an extremely rewarding experience getting to work with the high school teams testing the build process. They had a ton of great ideas and were so enthusiastic about getting involved in robotics and STEM in general. It was exactly what we were hoping to inspire with this project,” says JPL OSR designer and engineer Eric Junkins.
With an active builder/developer community, there are a number of directions development could take. It is possible technology developed by builders could be used in some way on future missions on Earth and in space, or universities and companies might one day launch their own. “We released this rover as a base model,” says Cox. “We hope to see the community contribute improvements and additions, and we’re really excited to see what the community will add to it.” The JPL OSR developers are also looking forward to seeing a fleet of these rovers pop up in schools and workshops everywhere.
Links